Change Lanes
|
Figures and examples
|
|
Changing lanes is an activity that helps illustrate how CAVs are different from cars with drivers. Three basic principles apply to changing lanes on a CAVWAY:
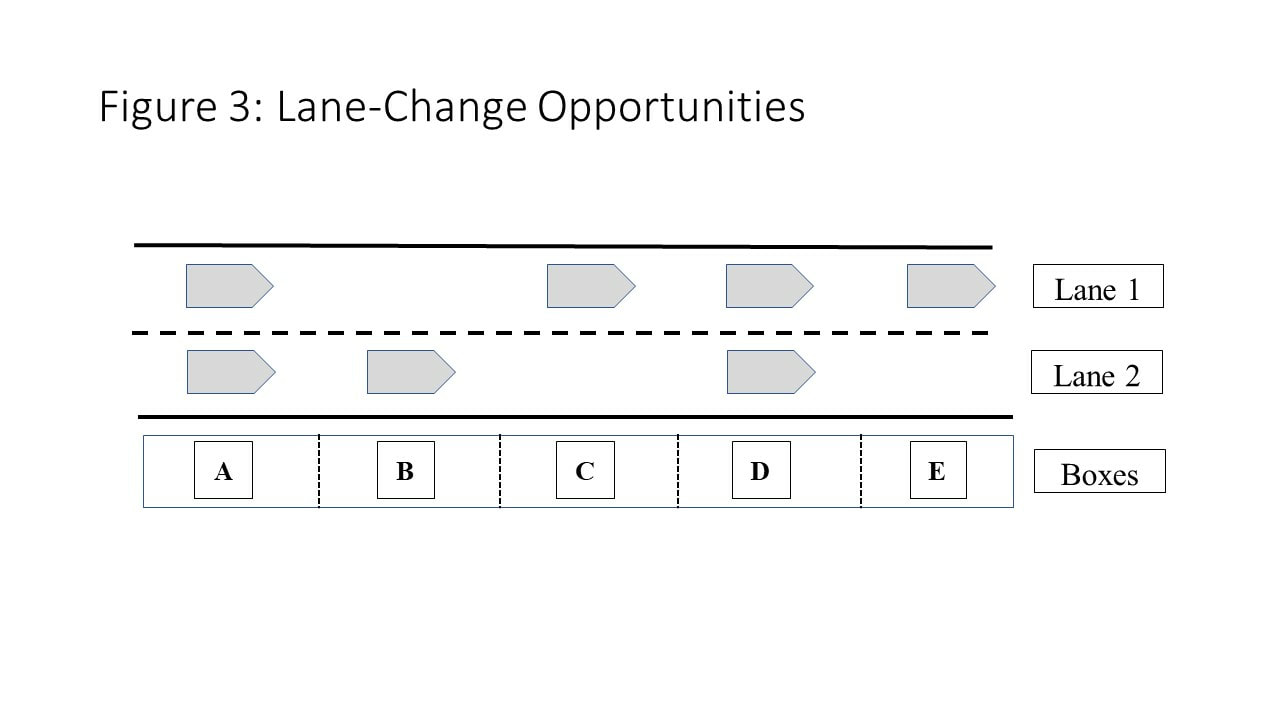
In the current example design (modeled under CSIM), CC determines lane-change protocols and broadcasts those to all CAVs. For example, on a 2-lane CAVWAY, CAVs exiting or moving from this CAVWAY to another at the next node must be in the number 2 (right, slow) lane. Other CAVs must be in the number 1 (left, fast) lane. Every CAV periodically assesses its situation, and then either stays in its current lane or changes lanes as indicated by the protocol. A CAVWAY typically will consist of three types of “lane.” CAVs would use an Express Lane to bypass nodes, a Local Lane to enter traffic flow or exit at the next node, and an Access Lane to move between a node and a Local Lane. Several types of lane change are modeled under CSIM:
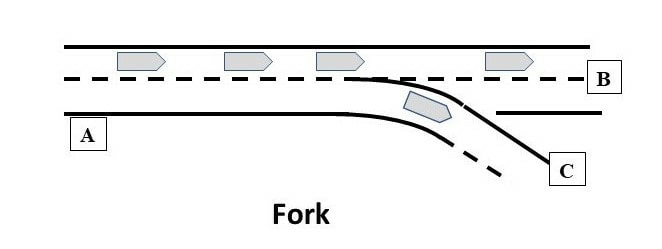
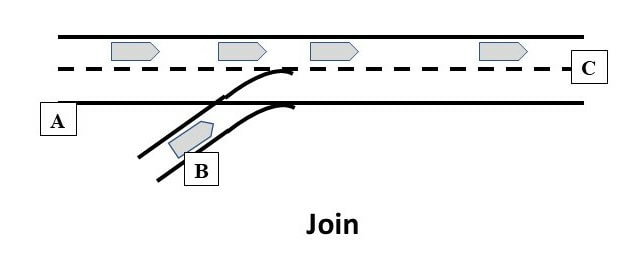
Forks and joins Lane changes are envisioned to support forks and joins. As shown at right (above), to execute a fork, a CAV must be in the correct lane to take the path of choice, to the left or right. As shown at right (below), to execute a join where two lanes merge into one, a CAV must make a safe change when space in the slow (right) lane is available. *A box is a construct used by CSIM to indicate a moving space that can contain a CAV. A CAV may only change lanes when there is an empty box in the adjacent (target) lane. |
The lane change requirement is one that could be delayed as part of a transition strategy. While vehicles are still only partially-automated (e.g., dual-mode), lane changes could be left to drivers to execute. See also transition.
Example Lane-Change Protocol exploration
Assuming a 2-lane CAVWAY where node N(i) monitors traffic toward N(i+1), CAVs traveling in the CAVWAY at node N(i) fall into two groups: group A, consisting of CAVs exiting at node N(i+1); and group B, consisting of CAVs exiting beyond node N(i+1). It is then possible to envision four scenarios at node N(i).
For scenarios 1, 2, and 3, the value of j may be set to 1; in other words, CAVs exiting at node N(i+1) are assigned to the right lane while all others are assigned to the left lane. Node N(i) would need to control the number of CAVs entering the corridor such that neither lane in the segment was loaded beyond capacity. Under scenario 4, where more CAVs are traveling long distances, j could be set to a value greater than 1 to offload traffic from the left lane and take advantage of available space in the right lane. This situation would need to be monitored to assure that the value of j was always low enough to allow all exiting vehicles access to the right lane. While more efficient approaches may yet be discovered, this exercise shows that it is possible to accommodate necessary CAV exits and to maintain (relatively) efficient use of the entire CAVWAY . The protocol was verified using CSIM. |
